Deep Orange 15
ENGINEERED BY:
POWERED BY:
The Deep Orange 15 vehicle is a dynamic research platform that presents an innovative solution for post-disaster reconnaissance and support, integrating autonomous navigation and advanced imaging technology. With its extensive sensor suites, accurate data collection, robust network capabilities, and maintenance features, it is an invaluable tool for researchers and emergency response teams.
Rescue operators have long followed the “golden hour” guideline, aiming to provide medical care in the critical period following an injury to maximize chances of survival in natural disasters such as earthquakes, fires, and hurricanes.
Working with the U.S. Army and others, Clemson students are working to improve rescue response times in extreme environments while also minimizing personnel required for individual rescue operations.
Deep Orange 15, featuring high-speed, off-road, optionally piloted rescue functionality, will use advanced driverless technology and a powerful propulsion configuration to traverse off-road terrain from desert sands and boulders to urban rubble.
CRITICAL VEHICLE FUNCTIONS

Off-Road Planning and Maneuverability
The vehicle continuously updates its path and map based on real-time sensor data, ensuring adaptability to environmental changes. Additionally, the Deep Orange vehicle features large 40-inch tires and custom long-travel suspensions, providing up to 20 inches of wheel travel for overcoming obstacles and enhancing off-road maneuverability. Its hydraulic steering system and semi-active dampers further contribute to its robust off-road capabilities.

Mission Planning and Autonomy
The Deep Orange vehicle is equipped with advanced autonomy and mission planning capabilities to navigate unknown and dynamically changing terrains effectively. Its autonomous algorithms allow for precise mission planning based on manual operation to a rescue site when the vehicle collects environmental data to create an initial digital map. During the autonomous phase, the vehicle employs real-time path planning, updating routes based on sensor inputs to adapt to environmental changes. The LiDAR system detects and classifies obstacles, enabling dynamic path re-planning for safe navigation. Additionally, the terrain analysis feature identifies drivable surfaces and avoids hazardous areas, while continuous map updating ensures adaptability to unexpected obstacles or newly discovered terrain features. This robust system makes the vehicle highly capable when conducting autonomous off-road navigation and mission-critical operations in challenging environments.
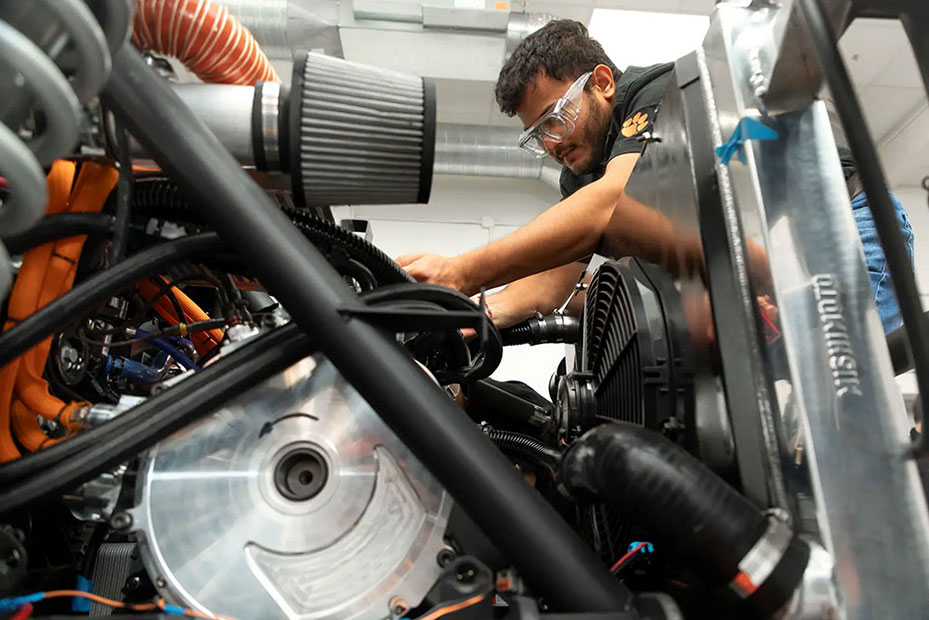
Series Hybrid Propulsion
The series hybrid propulsion system of the Deep Orange vehicle is designed to enhance occupant space and maximize performance by using a flexible high-voltage cable architecture, eliminating the need for bulky mechanical components. This system features a 19kWh battery pack that complements the diesel engine, offsetting its low power density while leveraging its efficiency as an energy source. The powertrain delivers a substantial total power output of 370kW through the drivetrain. The onboard diesel engine also doubles as a portable generator, providing versatile power solutions for various scenarios.

Litter Loading Mechanism
The litter loading mechanism for the Deep Orange vehicle, developed in collaboration with North American Rescue, features an innovative mechanism designed to enhance the efficiency and safety of patient loading during rescue operations. Recognizing the need for a less physically taxing process, the design incorporates slides and a turntable, allowing the loading platform to extend completely out of the vehicle and swivel. This enables rescuers to load patients sideways, reducing strain and uncomfortable postures associated with longitudinal loading. This mechanism significantly improves rescuers’ and patients’ safety and comfort, ensuring a smoother and more ergonomic loading process.

Fox Factory Semi-Active Suspension
The semi-active suspension system of the vehicle leverages the advanced capabilities of autonomy sensors to provide an optimized and comfortable ride. This system, supported by Fox Factory’s innovative LiveValve technology, dynamically adjusts the vehicle’s suspension damping in real-time based on terrain data gathered by the vehicle’s sensors, such as LiDAR and GPS. This adaptive suspension mechanism not only enhances ride comfort but also improves stability and handling in varying off-road conditions. Acknowledging the contribution of Fox Factory, this integration of cutting-edge suspension technology with sophisticated autonomy sensors exemplifies a significant advancement in vehicular off-road performance and reliability.

Brembo Brake by Wire System
The Brake by Wire system, sponsored by Brembo, equips the Deep Orange 15 vehicle with innovative braking technology that allows for individual modulation of braking torque at each wheel. This advanced system ensures that the ideal braking action is applied to each corner of the vehicle based on real-time requirements, enhancing overall vehicle stability and handling. By optimizing brake force distribution, the system significantly improves the vehicle’s maneuverability and safety, especially in challenging off-road conditions. This cutting-edge technology showcases Brembo’s commitment to advancing automotive performance through precise and responsive braking solutions.
DO15 Team
Automotive Engineering Students and Leadership

Kashyap Bagri
Powertrain

Dijul Dileep
Vehicle Performance and Dynamics

Kiran Ganesh
Vehicle Performance and Dynamics

Anand Ramesh Ganthale
Structures and Interiors

Drew Girshovich
Structures and Interior

Saumil Jain
Powertrain

Timothy Jenkins
Vehicle Performance and Dynamics

Aniruddha Joshi
Powertain

Ankit Kulkarni
Powertrain

Athinarapu Pavan Kumar
Autonomy and Structures

Anirudh Kyatham
Autonomy and Vehicle Dynamics

Shantanu Lanke
Powertrain

Rishie Aravind Madhu
Vehicle Performance and Dynamics

Aayush Patel
Powertrain

Nikhil Patro
Powertrain

Rohit Ravikumar
Vehicle Performance and Dynamics

Ashwin Sankar
Vehicle Performance and Dynamics

Mrunali Mahadeo Sawant
Autonomy

Vasanth Seethapathi
Autonomy and Vehicle Dynamics

Kush Shah
Structures and Interiors

Aayush Shenoy
Powertrain

Charlie Stabler
Vehicle Performance and Dynamics

Vinit Talele
Vehicle Performance and Dynamics

Abhilash Tukkar
Powertrain

Pranay Verma
Powertrain

Ninad Vilas Tarare
Autonomy

Johnell Brooks
Professor, Human Factors

Jamie Forbes
Professor of Practice, Platform Development

Benjamin Johnson
PhD Student, Perception and Path Planning

Anshul Karn
Deep Orange Project Manager
Abdullah Kose
PhD Student, Vehicle Performance

Jerome McClendon
Research Assistant Professor – Human Machine Interface

Trupti Nyalkalkar
Research Engineering, Electronics and Electrical Systems

Chris Paredis
Professor, Autonomy

Robert Prucka
Professor, Powertrain and Project Manager

Morteza Sabet
Research Assistant Professor, Structures and Materials

Aaron Wright
Research Associate, Vehicle Manufacturing

Gary Mathis
Research Associate, Component Manufacturing

Meredith McCameron
Procurement Specialist

Cindy McMahan
Procurement Manager

Jeremy Barnes
Research Associate

Brad Burgess
Research Associate, Laboratory Safety
PARTNERS
The following organizations have provided generous support, in-kind contributions, and mentoring to achieve the objectives of Deep Orange 15.