
Research Focus Area:
Digital Engineering and Virtual Prototyping
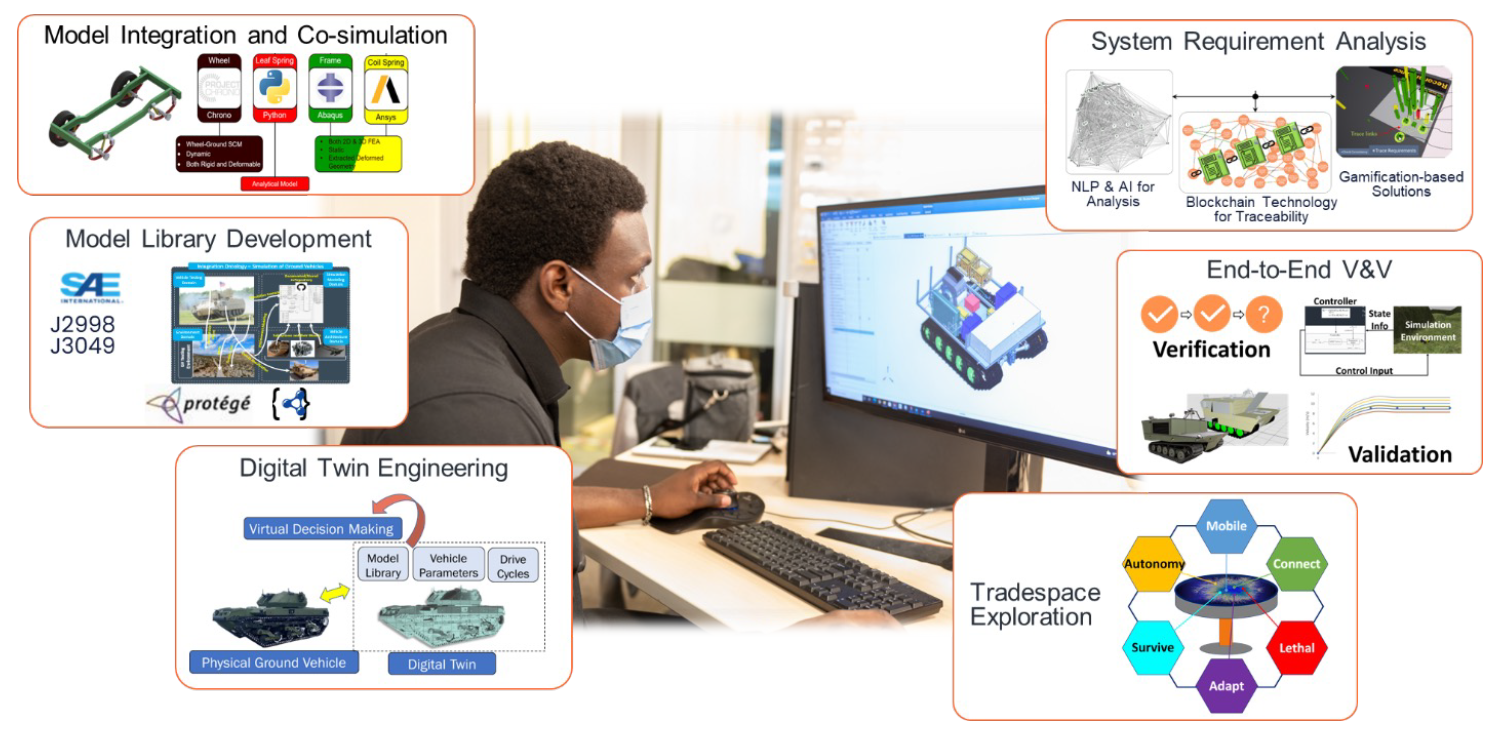
The autonomy and power and energy focal areas feed into the digital engineering focal area, to enable the creation of a comprehensive framework for Virtual Prototyping of a complex system such as the modern off-road autonomous vehicle. Key enablers comprise a rigorous definition of requirements, tradespace exploration, and decision-making methodologies. Ultimately, digital engineering methodologies will enable the rapid transition from a concept to a fully optimized complex ground system in the form of a digital twin that can subsequently be validated in a virtual space before moving on to agile physical prototyping.
Focus Area Director
Greg Mocko
Associate Professor, School of Mechanical and Automotive Engineering
gmocko@clemson.edu
Complex and dynamic operational contexts require the agile development and deployment of the next-generation combat vehicle. To achieve such agility without compromising reliability, robustness, or mission readiness, new methods and tools are needed to allow systems and design engineers across multiple organizations to explore novel, innovative vehicle concepts, predict their performance in different operational scenarios, monitor their health during operation, and learn from these observations to expand and improve the domain knowledge
Research Efforts
-
3.1 Computational Representation and Analysis of Mission and System Requirements
Professor
Rahul Rai
Motivation
Mission-level requirements cascade down and significantly impact system architecture, design and cost.
Goal
Create formal methods and associated computational tools to aid in the development of system-level requirements.
Approach
Use formal languages, natural language processing, and gaming to support derivation, visualization and change management of requirements networks.
-
3.2 Model Interface Specification and Environment to Support Model Integration
Professor
Greg Mocko
Motivation
Virtual prototyping requires the integration of models across multiple disciplines and software environments
Goal
Increase reuse of behavioral models in ground vehicle simulation
Approach
- Curation and catalog of simulation models
- Ontological approach for model definition
- Retrieval and integration framework
-
3.3 Best Practices for Computational Tradespace Exploration, Analysis and Decision-Making Tradespace Exploration, Analysis and Decision-Making
Professor
Cameron Turner
Motivation
Enhance the abilities of stakeholders to balance vehicle performance and capabilities versus project risk, budget, and schedule in a visual virtual environment
Goal
Enhance rapid, effective trade space exploration and analysis to guide the development of vehicle-level requirements
Approach
Enhance optimization and analysis through decomposition and surrogate modeling, highlight trade-off costs, use Bayesian techniques to validate decision-maker preferences and identify best practices for trade spaces
-
3.4 Validation & Verification, Digital Twin
Professor
Laura Redmond
Motivation
To facilitate rapid virtual prototyping of autonomy-enabled ground vehicles, V&V processes must be created that ensure the accuracy and suitability of rapidly deployable models. The availability of digital twin tools will empower engineers in the analysis of product design and requirements development
Goal
- Create tools for improving vehicle safety and performance
- Establish methods for increasing available quantitative data for test planning and risk management
Approach
Formal V&V methods and tools that can be applied in the planning, prototyping, and active-duty phases of an autonomy-enabled ground vehicle
-
3.5 Agile Virtual and Physical Prototyping in Deep Orange
Professor
Chris Paredis
Motivation
Details to come
Goal
Details to come
Approach
Details to come
-
3.6 Collaborative Design Teaming and Immersive Technologies for Ground Vehicle Systems Design
Professor
Greg Mocko
Motivation
The development of next generation ground vehicles is often accomplished via geographically dispersed teams using technology and associated mixed media vehicle representations. There are significant gaps that limit collaboration.
Goal
Develop an environment to enhance collaboration between engineering teams in multiple locations using immersive technology
Approach
Identify hardware and software to support collaboration within conceptual design
-
3.7 Computationally Augmented Decision Making in Model Creation, Validation, and Trade Space Evaluation
Professor
John Wagner
Motivation
Digital Twin tools enable virtual design to shorten product cycles and satisfy system requirements. The availability of subassembly models that balance fidelity with computational resources is critical. Similarly, automating the design-decision-making process with digital strategies can alleviate this pinch point.
Goal
Leverage machine learning approaches for intelligent formulation of digital twins and computationally augmented decision-making
Approach
Use Bayesian Machine Learning approach for intelligent assembly of digital twin models, and Introduce simulated Machine Learning Agents in trade space analysis rounds to evaluate virtual designs
-
3.22.8 Efficient Modeling and Guiding of Experimental Investigations of High-Performance Pistons Leveraging Bayesian and Machine Learning Approaches
Professor
Laura Redmond
Motivation
Desire to hasten adoption of new materials/coatings to improve ground vehicle performance
Goal
Create a streamlined design and qualification process that assesses thermal and mechanical performance of the piston while minimizing test expenses
Approach
- Select HTC boundary conditions and optimal sensor locations for piston testing leveraging Bayesian and machine learning approaches.
- Validation with engine tests using instrumented pistons
- Leverage the calibration/test planning methodology to formulate a streamlined procedure for design and qualification of next generation pistons considering fatigue
-
3.22.9 Virtual and Physical Prototyping Aided by Continuous Experimental Feedback: Deep Orange 15 Project
Professor
Robert Prucka
Motivation
Increasing ground speed of autonomous vehicles is a high priority – ‘Remote Rescue’
Goal
Produce a demonstration platform that integrates concepts of autonomy, wheeled vehicles, and hybrid powertrains to enable higher ground speeds over rough terrain
Approach
Design and build a ‘Remote Rescue’ vehicle with the Deep Orange process while being supported by a R&D vehicle team -
3.22.10 Cross-cutting Tradespace Techniques for Ground Vehicle Systems
Professor
Cameron Turner
Motivation
Complete the Design Loop by using collected on-vehicle test data to enable forward and reverse studies of platform designs (e.g., original concept, actual production, future enhancements) to identify successes and limitations of the designs for both Deep Orange and GVSC
Goal
Develop a unified Tradespace Environment for Ground Vehicle Systems, using historical on-vehicle sensor data and multi-fidelity vehicle technology models for internal (within Deep Orange/VIPR/GVSC) and external use that can inform two-stage decision-making and multi-objective problem decomposition within tradespace decision-making processes
Approach
Five Coordinated Research Efforts
- Effort 1 – Digital Twin Tradespace Analysis Strategy for Design Evaluation & Platform Enhancements for Ground Vehicles
- Effort 2 – Two-Stage Tradespace Decision-Making
- Effort 3 – Tradespace Fidelity
- Effort 4 – Relevant Data Extraction for Decision-Making
- Effort 5 – Data-Driven Decomposition with Multivariate Gaussian Process
-
3.22.11 Advanced Visualization, Simulation, and Human Integration through the Digital Design and Simulation Studio
Professor
Greg Mocko
Motivation
- To accelerate research within the VIPR-GS center and provide a shared facility focused on modeling and simulation.
- Provide a center-wide competence area to support research
Goal
Establish facility and sandbox to support an advanced visualization, identify modeling approaches and serve as the test-bed for advanced modeling and simulation and immersive and gaming approaches.
Approach
Engage with software partners, industry quad members, GVSC researchers, and VIPR-PI to identify the best practices for advanced modeling simulation -
3.22.12 Online Surrogate Optimization of the Tradespace
Professor
Margaret Wiecek
Motivation
More to come
Goal
More to come
Approach
More to come -
3.22.13 Leveraging Emerging Natural User Interface Technology to Support Optimal Soldier-Vehicle Interaction in Next-Generation Autonomous Vehicles
Professor
Julian Brinkley
Motivation
More to come
Goal
More to come
Approach
More to come
